兽药硫酸链霉素原粉:PID控制器
来源:百度文库 编辑:偶看新闻 时间:2024/04/24 01:41:54
百科名片
工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求。PID控制器是根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。不同的控制规律适用于不同的生产过程,必须合理选择相应的控制规律,否则PID控制器将达不到预期的控制效果。
目录
PID控制器反馈回路基础理论控制规律的选择比例(P)控制比例积分(PI)控制比例微分(PD)控制比例积分微分(PID)控制
PID控制器调试方法比例系数的调节积分系数的调节微分系数的调节
PID控制器的参数整定PID与自适应PID的区别:
PID控制器反馈回路基础理论控制规律的选择比例(P)控制比例积分(PI)控制比例微分(PD)控制比例积分微分(PID)控制
PID控制器调试方法比例系数的调节积分系数的调节微分系数的调节
PID控制器的参数整定PID与自适应PID的区别:
展开
编辑本段PID控制器
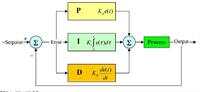
PID控制器(比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分单元 D 组成。通过Kp, Ki和Kd三个参数的设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。
PID 控制器是一个在工业控制应用中常见的反馈回路部件。这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。和其他简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回路却可以保持系统的稳定。
编辑本段反馈回路基础
一个控制回路包括三个部分:
系统的传感器得到的测量结果 控制器作出决定 通过一个输出设备来作出反应 控制器从传感器得到测量结果,然后用需求结果减去测量结果来得到误差。然后用误差来计算出一个对系统的纠正值来作为输入结果,这样系统就可以从它的输出结果中消除误差。
在一个PID回路中,这个纠正值有三种算法,消除目前的误差,平均过去的误差,和透过误差的改变来预测将来的误差。
比如说,假如一个水箱在为一个植物提供水,这个水箱的水需要保持在一定的高度。一个传感器就会用来检查水箱里水的高度,这样就得到了测量结果。控制器会有一个固定的用户输入值来表示水箱需要的水面高度,假设这个值是保持65%的水量。控制器的输出设备会连在一个马达控制的水阀门上。打开阀门就会给水箱注水,关上阀门就会让水箱里的水量下降。这个阀门的控制信号就是我们控制的变量,它也是这个系统的输入来保持这个水箱水量的固定。
PID控制器可以用来控制任何可以被测量的并且可以被控制变量。比如,它可以用来控制温度,压强,流量,化学成分,速度等等。汽车上的巡航定速功能就是一个例子。
一些控制系统把数个PID控制器串联起来,或是链成网络。这样的话,一个主控制器可能会为其他控制输出结果。一个常见的例子是马达的控制。我们会常常需要马达有一个控制的速度并且停在一个确定的位置。这样呢,一个子控制器来管理速度,但是这个子控制器的速度是由控制马达位置的主控制器来管理的。
连合和串联控制在化学过程控制系统中是很常见的。
编辑本段理论
PID是以它的三种纠正算法而命名的。这三种算法都是用加法调整被控制的数值。而实际上这些加法运算大部分变成了减法运算因为被加数总是负值。这三种算法是:
比例- 来控制当前,误差值和一个负常数P(表示比例)相乘,然后和预定的值相加。P只是在控制器的输出和系统的误差成比例的时候成立。这种控制器输出的变化与输入控制器的偏差成比例关系。比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。那么它在10°C的时候会输出100%,在15°C的时候会输出50%,在19°C的时候输出10%,注意在误差是0的时候,控制器的输出也是0。
积分 - 来控制过去,误差值是过去一段时间的误差和,然后乘以一个负常数I,然后和预定值相加。I从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会振荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上一个负的平均误差比例值,平均的系统误差值就会总是减少。所以,最终这个PID回路系统会在预定值定下来。
导数 - 来控制将来,计算误差的一阶导,并和一个负常数D相乘,最后和预定值相加。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。这个D参数也是PID被称为可预测的控制器的原因。D参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要D参数。 用更专业的话来讲,一个PID控制器可以被称作一个在频域系统的滤波器。这一点在计算它是否会最终达到稳定结果时很有用。如果数值挑选不当,控制系统的输入值会反复振荡,这导致系统可能永远无法达到预设值。
编辑本段控制规律的选择
尽管不同类型的控制器,其结构、原理各不相同,但是基本控制规律只有三个:比例(P)控制、积分(I)控制和微分(D)控制。这几种控制规律可以单独使用,但是更多场合是组合使用。如比例(P)控制、比例-积分(PI)控制、比例-积分-微分(PID)控制等。比例(P)控制
单独的比例控制也称“有差控制”,输出的变化与输入控制器的偏差成比例关系,偏差越大输出越大。实际应用中,比例度的大小应视具体情况而定,比例度太大,控制作用太弱,不利于系统克服扰动,余差太大,控制质量差,也没有什么控制作用;比例度太小,控制作用太强,容易导致系统的稳定性变差,引发振荡。
对于反应灵敏、放大能力强的被控对象,为提高系统的稳定性,应当使比例度稍大些;而对于反应迟钝,放大能力又较弱的被控对象,比例度可选小一些,以提高整个系统的灵敏度,也可以相应减小余差。
单纯的比例控制适用于扰动不大,滞后较小,负荷变化小,要求不高,允许有一定余差存在的场合。工业生产中比例控制规律使用较为普遍。比例积分(PI)控制
比例控制规律是基本控制规律中最基本的、应用最普遍的一种,其最大优点就是控制及时、迅速。只要有偏差产生,控制器立即产生控制作用。但是,不能最终消除余差的缺点限制了它的单独使用。克服余差的办法是在比例控制的基础上加上积分控制作用。
积分控制器的输出与输入偏差对时间的积分成正比。这里的“积分”指的是“积累”的意思。积分控制器的输出不仅与输入偏差的大小有关,而且还与偏差存在的时间有关。只要偏差存在,输出就会不断累积(输出值越来越大或越来越小),一直到偏差为零,累积才会停止。所以,积分控制可以消除余差。积分控制规律又称无差控制规律。
积分时间的大小表征了积分控制作用的强弱。积分时间越小,控制作用越强;反之,控制作用越弱。
积分控制虽然能消除余差,但它存在着控制不及时的缺点。因为积分输出的累积是渐进的,其产生的控制作用总是落后于偏差的变化,不能及时有效地克服干扰的影响,难以使控制系统稳定下来。所以,实用中一般不单独使用积分控制,而是和比例控制作用结合起来,构成比例积分控制。这样取二者之长,互相弥补,既有比例控制作用的迅速及时,又有积分控制作用消除余差的能力。因此,比例积分控制可以实现较为理想的过程控制。
比例积分控制器是目前应用最为广泛的一种控制器,多用于工业生产中液位、压力、流量等控制系统。由于引入积分作用能消除余差,弥补了纯比例控制的缺陷,获得较好的控制质量。但是积分作用的引入,会使系统稳定性变差。对于有较大惯性滞后的控制系统,要尽量避免使用。比例微分(PD)控制
比例积分控制对于时间滞后的被控对象使用不够理想。所谓“时间滞后”指的是:当被控对象受到扰动作用后,被控变量没有立即发生变化,而是有一个时间上的延迟,比如容量滞后,此时比例积分控制显得迟钝、不及时。为此,人们设想:能否根据偏差的变化趋势来做出相应的控制动作呢?犹如有经验的操作人员,即可根据偏差的大小来改变阀门的开度(比例作用),又可根据偏差变化的速度大小来预计将要出现的情况,提前进行过量控制,“防患于未然”。这就是具有“超前”控制作用的微分控制规律。微分控制器输出的大小取决于输入偏差变化的速度。
微分输出只与偏差的变化速度有关,而与偏差的大小以及偏差是否存在与否无关。如果偏差为一固定值,不管多大,只要不变化,则输出的变化一定为零,控制器没有任何控制作用。微分时间越大,微分输出维持的时间就越长,因此微分作用越强;反之则越弱。当微分时间为0时,就没有微分控制作用了。同理,微分时间的选取,也是需要根据实际情况来确定的。
微分控制作用的特点是:动作迅速,具有超前调节功能,可有效改善被控对象有较大时间滞后的控制品质;但是它不能消除余差,尤其是对于恒定偏差输入时,根本就没有控制作用。因此,不能单独使用微分控制规律。
比例和微分作用结合,比单纯的比例作用更快。尤其是对容量滞后大的对象,可以减小动偏差的幅度,节省控制时间,显著改善控制质量。比例积分微分(PID)控制
最为理想的控制当属比例-积分-微分控制规律。它集三者之长:既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
编辑本段PID控制器调试方法
比例系数的调节
比例系数P的调节范围一般是:0.1--100.
如果增益值取 0.1,PID 调节器输出变化为十分之一的偏差值。如果增益值取 100, PID 调节器输出变化为一百倍的偏差值。
可见该值越大,比例产生的增益作用越大。初调时,选小一些,然后慢慢调大,直到系统波动足够小时,再该调节积分或微分系数。过大的P值会导致系统不稳定,持续振荡;过小的P值又会使系统反应迟钝。合适的值应该使系统由足够的灵敏度但又不会反应过于灵敏,一定时间的迟缓要靠积分时间来调节。积分系数的调节
积分时间常数的定义是,偏差引起输出增长的时间。积分时间设为 1秒,则输出变化 100%所需时间为 1 秒。初调时要把积分时间设置长些,然后慢慢调小直到系统稳定为止。微分系数的调节
微分值是偏差值的变化率。例如,如果输入偏差值线性变化,则在调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。如果通过比例、积分参数的调节还是收不到理想的控制要求,就可以调节微分时间。初调时把这个系数设小,然后慢慢调大,直到系统稳定。
编辑本段PID控制器的参数整定
PID控制器的参数整定是控制系统设计的核心内容。它是根据被 控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是 依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主 要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需 要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡, 记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
在实际调试中,只能先大致设定一个经验值,然后根据调节效果修改。
对于温度系统:P(%)20--60,I(分)3--10,D(分)0.5--3
对于流量系统:P(%)40--100,I(分)0.1--1
对于压力系统:P(%)30--70,I(分)0.4--3
对于液位系统:P(%)20--80,I(分)1--5
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求。PID控制器是根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。不同的控制规律适用于不同的生产过程,必须合理选择相应的控制规律,否则PID控制器将达不到预期的控制效果。
目录
PID控制器反馈回路基础理论控制规律的选择比例(P)控制比例积分(PI)控制比例微分(PD)控制比例积分微分(PID)控制
PID控制器调试方法比例系数的调节积分系数的调节微分系数的调节
PID控制器的参数整定PID与自适应PID的区别:
PID控制器反馈回路基础理论控制规律的选择比例(P)控制比例积分(PI)控制比例微分(PD)控制比例积分微分(PID)控制
PID控制器调试方法比例系数的调节积分系数的调节微分系数的调节
PID控制器的参数整定PID与自适应PID的区别:
展开
编辑本段PID控制器
PID控制器(比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分单元 D 组成。通过Kp, Ki和Kd三个参数的设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。
PID 控制器是一个在工业控制应用中常见的反馈回路部件。这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。和其他简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回路却可以保持系统的稳定。
编辑本段反馈回路基础
一个控制回路包括三个部分:
系统的传感器得到的测量结果 控制器作出决定 通过一个输出设备来作出反应 控制器从传感器得到测量结果,然后用需求结果减去测量结果来得到误差。然后用误差来计算出一个对系统的纠正值来作为输入结果,这样系统就可以从它的输出结果中消除误差。
在一个PID回路中,这个纠正值有三种算法,消除目前的误差,平均过去的误差,和透过误差的改变来预测将来的误差。
比如说,假如一个水箱在为一个植物提供水,这个水箱的水需要保持在一定的高度。一个传感器就会用来检查水箱里水的高度,这样就得到了测量结果。控制器会有一个固定的用户输入值来表示水箱需要的水面高度,假设这个值是保持65%的水量。控制器的输出设备会连在一个马达控制的水阀门上。打开阀门就会给水箱注水,关上阀门就会让水箱里的水量下降。这个阀门的控制信号就是我们控制的变量,它也是这个系统的输入来保持这个水箱水量的固定。
PID控制器可以用来控制任何可以被测量的并且可以被控制变量。比如,它可以用来控制温度,压强,流量,化学成分,速度等等。汽车上的巡航定速功能就是一个例子。
一些控制系统把数个PID控制器串联起来,或是链成网络。这样的话,一个主控制器可能会为其他控制输出结果。一个常见的例子是马达的控制。我们会常常需要马达有一个控制的速度并且停在一个确定的位置。这样呢,一个子控制器来管理速度,但是这个子控制器的速度是由控制马达位置的主控制器来管理的。
连合和串联控制在化学过程控制系统中是很常见的。
编辑本段理论
PID是以它的三种纠正算法而命名的。这三种算法都是用加法调整被控制的数值。而实际上这些加法运算大部分变成了减法运算因为被加数总是负值。这三种算法是:
比例- 来控制当前,误差值和一个负常数P(表示比例)相乘,然后和预定的值相加。P只是在控制器的输出和系统的误差成比例的时候成立。这种控制器输出的变化与输入控制器的偏差成比例关系。比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。那么它在10°C的时候会输出100%,在15°C的时候会输出50%,在19°C的时候输出10%,注意在误差是0的时候,控制器的输出也是0。
积分 - 来控制过去,误差值是过去一段时间的误差和,然后乘以一个负常数I,然后和预定值相加。I从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会振荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上一个负的平均误差比例值,平均的系统误差值就会总是减少。所以,最终这个PID回路系统会在预定值定下来。
导数 - 来控制将来,计算误差的一阶导,并和一个负常数D相乘,最后和预定值相加。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。这个D参数也是PID被称为可预测的控制器的原因。D参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要D参数。 用更专业的话来讲,一个PID控制器可以被称作一个在频域系统的滤波器。这一点在计算它是否会最终达到稳定结果时很有用。如果数值挑选不当,控制系统的输入值会反复振荡,这导致系统可能永远无法达到预设值。
编辑本段控制规律的选择
尽管不同类型的控制器,其结构、原理各不相同,但是基本控制规律只有三个:比例(P)控制、积分(I)控制和微分(D)控制。这几种控制规律可以单独使用,但是更多场合是组合使用。如比例(P)控制、比例-积分(PI)控制、比例-积分-微分(PID)控制等。比例(P)控制
单独的比例控制也称“有差控制”,输出的变化与输入控制器的偏差成比例关系,偏差越大输出越大。实际应用中,比例度的大小应视具体情况而定,比例度太大,控制作用太弱,不利于系统克服扰动,余差太大,控制质量差,也没有什么控制作用;比例度太小,控制作用太强,容易导致系统的稳定性变差,引发振荡。
对于反应灵敏、放大能力强的被控对象,为提高系统的稳定性,应当使比例度稍大些;而对于反应迟钝,放大能力又较弱的被控对象,比例度可选小一些,以提高整个系统的灵敏度,也可以相应减小余差。
单纯的比例控制适用于扰动不大,滞后较小,负荷变化小,要求不高,允许有一定余差存在的场合。工业生产中比例控制规律使用较为普遍。比例积分(PI)控制
比例控制规律是基本控制规律中最基本的、应用最普遍的一种,其最大优点就是控制及时、迅速。只要有偏差产生,控制器立即产生控制作用。但是,不能最终消除余差的缺点限制了它的单独使用。克服余差的办法是在比例控制的基础上加上积分控制作用。
积分控制器的输出与输入偏差对时间的积分成正比。这里的“积分”指的是“积累”的意思。积分控制器的输出不仅与输入偏差的大小有关,而且还与偏差存在的时间有关。只要偏差存在,输出就会不断累积(输出值越来越大或越来越小),一直到偏差为零,累积才会停止。所以,积分控制可以消除余差。积分控制规律又称无差控制规律。
积分时间的大小表征了积分控制作用的强弱。积分时间越小,控制作用越强;反之,控制作用越弱。
积分控制虽然能消除余差,但它存在着控制不及时的缺点。因为积分输出的累积是渐进的,其产生的控制作用总是落后于偏差的变化,不能及时有效地克服干扰的影响,难以使控制系统稳定下来。所以,实用中一般不单独使用积分控制,而是和比例控制作用结合起来,构成比例积分控制。这样取二者之长,互相弥补,既有比例控制作用的迅速及时,又有积分控制作用消除余差的能力。因此,比例积分控制可以实现较为理想的过程控制。
比例积分控制器是目前应用最为广泛的一种控制器,多用于工业生产中液位、压力、流量等控制系统。由于引入积分作用能消除余差,弥补了纯比例控制的缺陷,获得较好的控制质量。但是积分作用的引入,会使系统稳定性变差。对于有较大惯性滞后的控制系统,要尽量避免使用。比例微分(PD)控制
比例积分控制对于时间滞后的被控对象使用不够理想。所谓“时间滞后”指的是:当被控对象受到扰动作用后,被控变量没有立即发生变化,而是有一个时间上的延迟,比如容量滞后,此时比例积分控制显得迟钝、不及时。为此,人们设想:能否根据偏差的变化趋势来做出相应的控制动作呢?犹如有经验的操作人员,即可根据偏差的大小来改变阀门的开度(比例作用),又可根据偏差变化的速度大小来预计将要出现的情况,提前进行过量控制,“防患于未然”。这就是具有“超前”控制作用的微分控制规律。微分控制器输出的大小取决于输入偏差变化的速度。
微分输出只与偏差的变化速度有关,而与偏差的大小以及偏差是否存在与否无关。如果偏差为一固定值,不管多大,只要不变化,则输出的变化一定为零,控制器没有任何控制作用。微分时间越大,微分输出维持的时间就越长,因此微分作用越强;反之则越弱。当微分时间为0时,就没有微分控制作用了。同理,微分时间的选取,也是需要根据实际情况来确定的。
微分控制作用的特点是:动作迅速,具有超前调节功能,可有效改善被控对象有较大时间滞后的控制品质;但是它不能消除余差,尤其是对于恒定偏差输入时,根本就没有控制作用。因此,不能单独使用微分控制规律。
比例和微分作用结合,比单纯的比例作用更快。尤其是对容量滞后大的对象,可以减小动偏差的幅度,节省控制时间,显著改善控制质量。比例积分微分(PID)控制
最为理想的控制当属比例-积分-微分控制规律。它集三者之长:既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
编辑本段PID控制器调试方法
比例系数的调节
比例系数P的调节范围一般是:0.1--100.
如果增益值取 0.1,PID 调节器输出变化为十分之一的偏差值。如果增益值取 100, PID 调节器输出变化为一百倍的偏差值。
可见该值越大,比例产生的增益作用越大。初调时,选小一些,然后慢慢调大,直到系统波动足够小时,再该调节积分或微分系数。过大的P值会导致系统不稳定,持续振荡;过小的P值又会使系统反应迟钝。合适的值应该使系统由足够的灵敏度但又不会反应过于灵敏,一定时间的迟缓要靠积分时间来调节。积分系数的调节
积分时间常数的定义是,偏差引起输出增长的时间。积分时间设为 1秒,则输出变化 100%所需时间为 1 秒。初调时要把积分时间设置长些,然后慢慢调小直到系统稳定为止。微分系数的调节
微分值是偏差值的变化率。例如,如果输入偏差值线性变化,则在调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。如果通过比例、积分参数的调节还是收不到理想的控制要求,就可以调节微分时间。初调时把这个系数设小,然后慢慢调大,直到系统稳定。
编辑本段PID控制器的参数整定
PID控制器的参数整定是控制系统设计的核心内容。它是根据被 控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是 依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主 要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需 要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡, 记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
在实际调试中,只能先大致设定一个经验值,然后根据调节效果修改。
对于温度系统:P(%)20--60,I(分)3--10,D(分)0.5--3
对于流量系统:P(%)40--100,I(分)0.1--1
对于压力系统:P(%)30--70,I(分)0.4--3
对于液位系统:P(%)20--80,I(分)1--5
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
模糊PID控制器
如何进行模糊PID控制器分析及设计
PID控制器的P.I.D三个参数如何设定
最少拍无纹波控制器的设计及与常规数字PID控制器的比较
PID是什么?
何谓PID?
什么是PID和父PID
知道PID怎么查询父进程pid?
PID号码是什么啊
PID控制怎么调节?
PID的意思
遇到pid error 怎么办?
MATV1的PID码
PID是啥?
What means PID
PID调节是怎么回事?
什么叫PID
pid算法是什么?
卫星电视PID参数
积分分离PID
什么是PID图?
进程里的PID与父PID是指什么
PID与自适应PID的区别在哪里??
怎么用PID查看病毒